I’ll archive the repo by the end of August 2021.
The main reason is Hugo pipes are built-in and pretty much cover what Hugulp does.
I think the only part missing is image optimization, but I think you can build a pipe to do it.
The other reason is it badly needs an update to gulp 4 and although it doesn’t seem like that hard a task, I don’t have the appetite to do it.
If you’re using hugulp v1, please take note of the following changes:
-
hugo is no longer invoked by hugulp
use hugo as per its docs, then invoke hugulp build
-
put your assets in the static folder
for example, static/styles, static/images, static/scripts
-
themes are supported out of the box
Note: If you need sass/less/js pre-processing, read v2 docs below
hugulp is a tool to optimize the assets of a Hugo website.
The main idea is to recreate the famous Ruby on Rails Asset Pipeline, which minifies, concatenates and fingerprints the assets used in your website.
This leads to less and smaller network requests to your page, improving overall user experience.
Read this blog post and this article for additional context.
Note: These articles refer to v1
It’s internally driven by Gulp.
This project Includes the following tools, tasks and workflows:
Node needs to be installed in your system.
Then just
Or you can build and run using docker:
# Default docker setup:
$ ./scripts/create-docker-machine-and-run-it
# -- OR --
# Run with custom machine name, specific hugo version, specific node version and run docker in detached mode:
$ ./scripts/create-docker-machine-and-run-it -a app-devel -g 0.20.6 -n 6.10.0 -d
Note: You only run the ./scripts/create-docker-machine-and-run-it if you want to create a new docker machine. Once the docker machine is created, you have to use docker commands to manage it. Please be familiar with docker in this regard.
The most common usage scenario would be:
$ hugo new site yoursite
$ cd yoursite
$ hugulp init
# create content
# add images (static/images), css (static/styles) and javascript (static/scripts)
$ hugo server -D # for development
# development is done, ready to publish
$ rm -rf public # clean up public folder, it will be re-generated by hugo
$ hugo # for release/production/deployment
$ hugulp build # optimize the site by running the asset pipeline
Another scenario would be to include sass/less pre-processing:
$ hugo new site yoursite
$ cd yoursite
$ hugulp init
# create content
# add images (static/images), and javascript (static/scripts)
# add sass/less (assets/styles)
$ hugo server -D # for development
$ hugulp watch # to convert sass/less (assets/styles) into css (static/styles)
# development is done, ready to publish
$ rm -rf public # clean up public folder, it will be re-generated by hugo
$ hugo # for release/production/deployment
$ hugulp build # optimize the site by running the asset pipeline
In both cases, you could chain the last 3 commands:
$ rm -rf public && hugo && hugulp build
hugulp requires a configuration file (.hugulprc), which is created by the hugulp init command (you can create the file manually if you want).
This is the default .hugulprc:
{
"version": 2,
"pipeline": ["images", "styles", "scripts", "fingerprint", "html"],
"path": {
"styles": "styles",
"images": "images",
"scripts": "scripts"
},
"watch": {
"source": "assets",
"target": "static"
},
"build": {
"source": "public",
"target": "public"
},
"autoprefixer": {
"browsers": ["last 2 versions"]
},
"cleancss": {
"advanced": false
},
"htmlmin": {
"collapseWhitespace": true
},
"gifsicle": { "interlaced": true },
"jpegtran": { "progressive": true },
"optipng": { "optimizationLevel": 5 },
"svgo": {
"plugins": [{ "removeViewBox": true }, { "cleanupIDs": false }]
}
}
You can easily customize hugulp‘s behavior, by modifying this configuration file, as described below.
hugulp will assist you if you’re using sass/less (and javascript), which require pre-processing.
It will watch for changes to styles or script files, process them and write them to hugo’s static folder, according to the following table
| In Folder |
Looks for |
Operation |
Written to |
| assets/styles |
s[a|c]ss, less, css |
Convert sass/less to css |
static/styles |
| assets/scripts |
js |
Lint javascript code (soon babelify) |
static/scripts |
Note: It searches the folders recursively
The table above applies to hugulp run with a default .hugulprc.
You can customize the folder names: resources instead of assets, js instead of scripts and so on.
This is described in the .hugulprc section below.
It optimizes the site that hugo built, by running the asset pipeline as defined in .hugulprc (field pipeline).
Additionally, files are not watched for changes
Display installed version.
Create a default .hugulprc.
By editing the .hugulprc configuration file, you can customize almost anything about hugulp.
Description of each field follows:
Defines which tasks of the asset pipeline will be executed (hugulp build command)
Type: array
Default:
"pipeline": ["images", "styles", "scripts", "fingerprint", "html"]
| Task |
Description |
| images |
minify images with imagemin |
| styles |
pre-process sass/less/css, then clean-css |
| scripts |
jshint, then uglify |
| fingerprint |
fingerprint with rev, then replace references with rev-replace |
| html |
minify html with htmlmin |
Let’s say you don’t want to fingerprint the assets. Just set pipeline to
"pipeline": ["images", "styles", "scripts", "html"]
By removing the fingerprint task, it will not be executed.
Note that tasks are executed sequentially.
Defines the name of the folders where your assets are located/will be transferred to.
Type: object
Default:
"path": {
"styles": "styles",
"images": "images",
"scripts": "scripts"
}
So if you prefer your styles folder to be called css, and scripts to be called js, you would change it to:
"path": {
"styles": "css",
"images": "images",
"scripts": "js"
}
Define which folders to watch for changes, for the hugulp watch command.
Type: object
Default:
"watch": {
"source": "assets",
"target": "static"
}
This field works together with the path field.
With a default .hugulprc, it will watch assets/styles and assets/scripts (recursively).
If you customized path as per above, it will watch assets/css and assets/js.
If you additionally want the assets folder to be called resources, change source to resources
"watch": {
"source": "resources",
"target": "static"
}
then it will watch resources/css and resources/js
Finally, the changes will be written to the well-known hugo static folder.
With a default .hugulprc, files will be written to static/styles and static/scripts.
Defines the folders referenced during the hugulp build command
Type: object
Default:
"build": {
"source": "public",
"target": "public"
}
This should generally be left unchanged.
hugo will output to the public folder by default, so hugulp build will process the files in-place.
Options for autoprefixer. Check gulp-autoprefixer for documentation.
Task: styles
Type: object
Default:
"autoprefixer": {
"browsers": ["last 2 versions"]
}
Options for clean-css. Check gulp-clean-css for documentation.
Task: styles
Default:
"cleancss": {
"advanced": false
}
Options for htmlmin. Check gulp-htmlmin for documentation.
Task: html
Default:
"htmlmin": {
"collapsedWhitespace": true
}
Options for gifsicle. Check gulp-imagemin for documentation.
Task: images
Default:
"gifsicle": {
"interlaced": true
}
Options for jpegtran. Check gulp-imagemin for documentation.
Task: images
Default:
"jpegtran": {
"progressive": true
}
Options for optipng. Check gulp-imagemin for documentation.
Task: images
Default:
"optipng": {
"optimizationLevel": 5
}
Options for svgo. Check gulp-imagemin for documentation.
Task: images
Default:
"svgo": {
"plugins": [{ "removeViewBox": true }, { "cleanupIDs": false }]
}
Whenever a new hugulp version becomes available, you can update it by running
Pull Requests are welcome 👍.
Made by Juan B. Rodriguez, with a MIT License.
Please share the article or leave your comments.
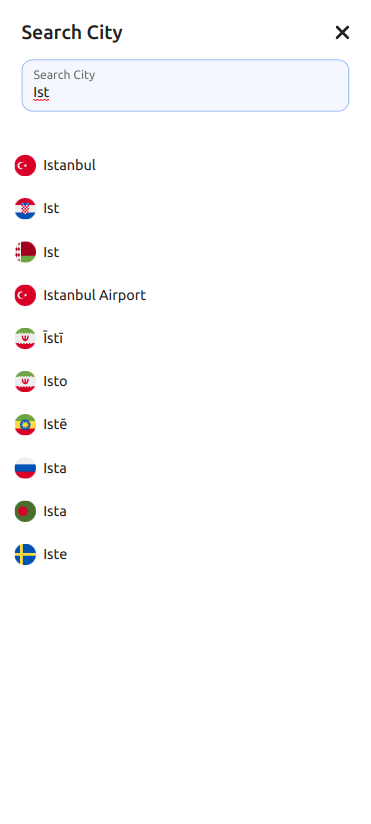
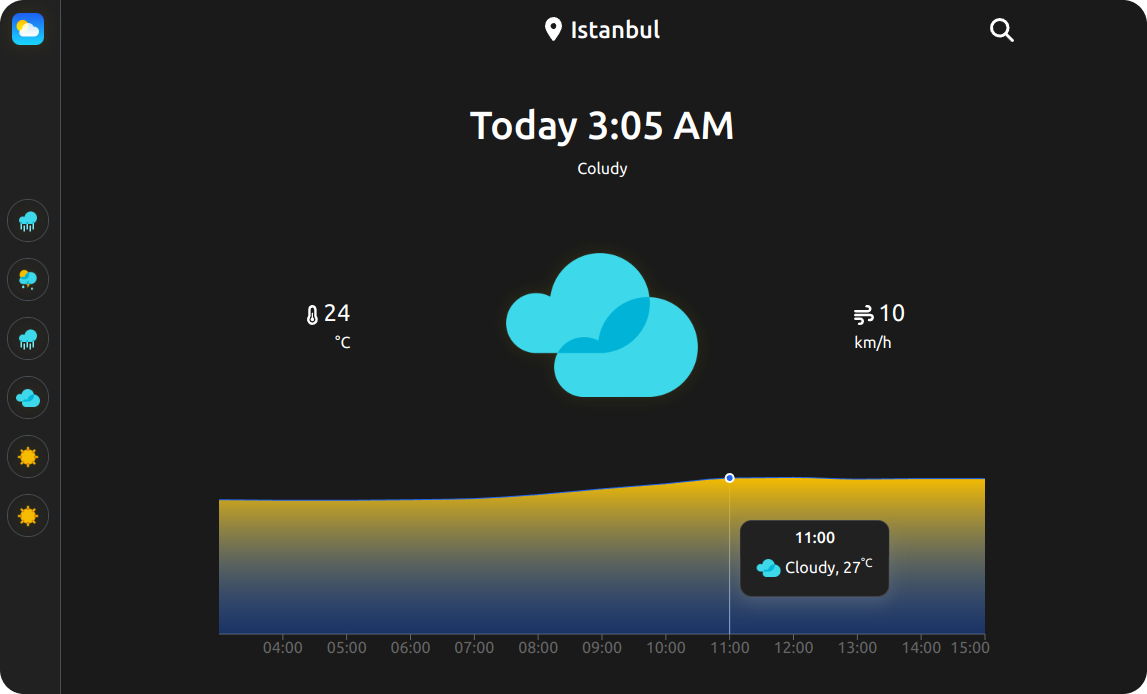
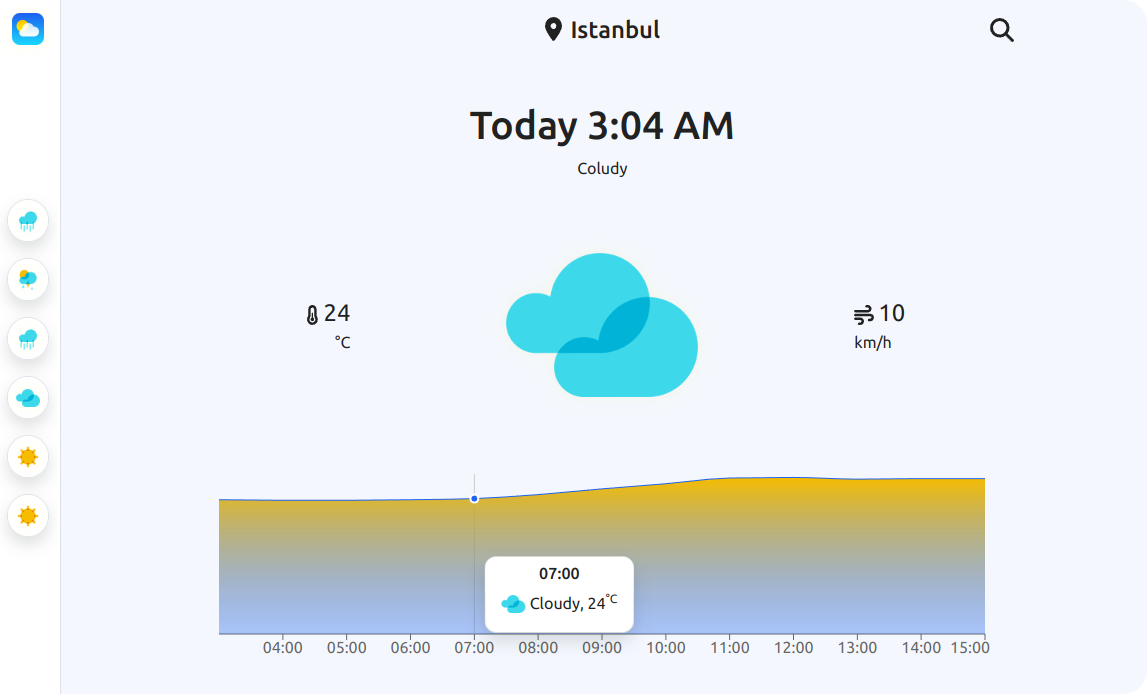









 https://github.com/hsyntes/react-weather
https://github.com/hsyntes/react-weather






















































































{kind=link}